

Application Case of Onboard Automatic Cruise Obstacle Avoidance and Early Warning System for Unmanned Surface Vessels of an Institute of CSIC
Customer Background
This institute is one of the core institutions engaged in the research and development of unmanned surface vessels in China. With the improvement of requirements for autonomous navigation capability, the project team needs a set of high-reliability, low false alarm rate onboard perception and obstacle avoidance system to support the autonomous navigation of unmanned surface vessels in complex sea area environments.
Existing Problems
• Traditional navigation radar has insufficient detection capability for small targets (floating buoys, small fishing boats), and missing alarms occur frequently
• Radar and photoelectric systems operate independently, making collaboration difficult, and target identification relies on manual judgment
• When navigating in narrow waterways, obstacle avoidance decisions are prone to deviate from the channel, bringing risk of stranding
• Tests require full-time intervention of operators, and real "autonomous navigation" cannot be achieved
Solutions
The HURYS ship safety driving early warning system was introduced, which takes 4D millimeter-wave radar and edge computing as the core, deeply integrates with the onboard photoelectric system, and supports autonomous cruise and obstacle avoidance of unmanned surface vessels:
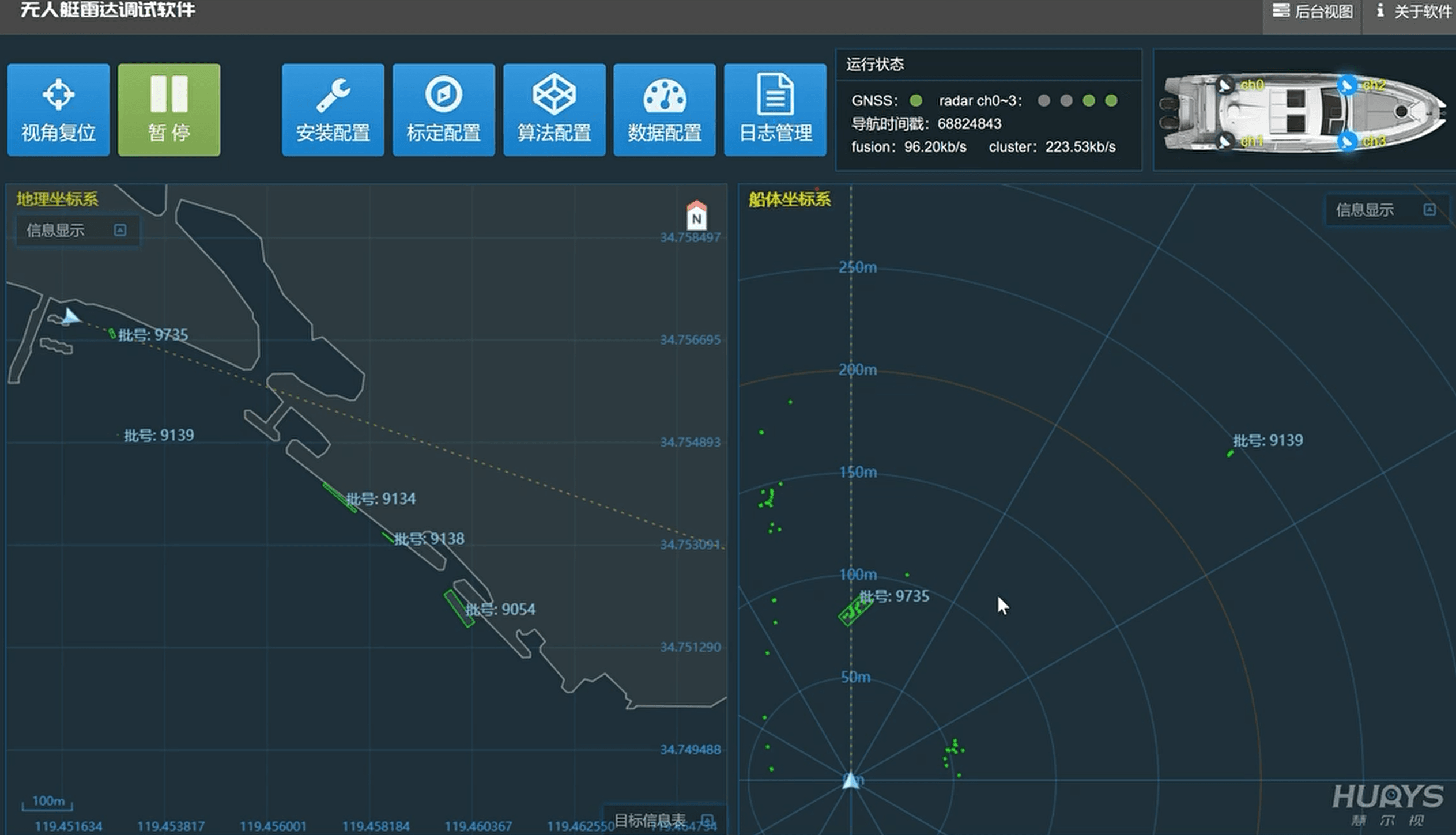
• Multi-source perception fusion: The onboard 4D radar scans surrounding waters in real time, the edge computing unit aligns and fuses radar points and photoelectric videos to generate a unified environmental situation. After the radar detects a target, it automatically guides the photoelectric system to lock and collect evidence, eliminating manual coordination errors
• Small target detection enhancement: The high-density point cloud capability of 4D radar effectively captures weak reflection targets such as floating buoys and small fishing boats, making up for the shortcomings of traditional radars, with a detection distance of more than 500 meters
• Autonomous obstacle avoidance decision-making: The system embeds intelligent obstacle avoidance algorithms for complex environments, automatically calculates the course and speed of targets according to obstacle types and relative motion situations, and supports the dynamic planning of safe paths by the vehicle control center
Implementation and Testing
The system completed multiple rounds of actual ship installation and sea trials on the unmanned vessel starting from 2023. The equipment is installed on the mast, 4 sets of radars cover 360° around the vessel, the edge computing unit is connected to the onboard display and control terminal, and operates in parallel with the original navigation system. Test scenarios cover open sea areas, complex nearshore waters and narrow channels.
 Application Effects
• Realization of autonomous navigation capability: Multiple rounds of autonomous cruise tests have been completed in the sea area. The system independently avoids obstacles such as fishing boats and navigation marks throughout the whole process. Operators only need to monitor without intervention
• Improved small target detection: The detection success rate of weak reflection targets such as floating buoys and small sampans has increased to over 95%, and the problem of missing alarms has been effectively solved
• Increased test efficiency: Operators have changed from "full-process operation" to "task monitoring", and the human input for a single test has been reduced by 60%. The data playback function provides support for subsequent algorithm optimization
Project Evaluation
"The core value of this system is that it has been verified on actual ships, and the closed loop of radar detection and obstacle avoidance decision-making has been realized at sea. Now when we conduct autonomous navigation tests, we can finally focus on mission planning instead of staring at the screen all the time fearing collision." —— Engineer from the unmanned surface vessel project team of the institute
Application Effects
• Realization of autonomous navigation capability: Multiple rounds of autonomous cruise tests have been completed in the sea area. The system independently avoids obstacles such as fishing boats and navigation marks throughout the whole process. Operators only need to monitor without intervention
• Improved small target detection: The detection success rate of weak reflection targets such as floating buoys and small sampans has increased to over 95%, and the problem of missing alarms has been effectively solved
• Increased test efficiency: Operators have changed from "full-process operation" to "task monitoring", and the human input for a single test has been reduced by 60%. The data playback function provides support for subsequent algorithm optimization
Project Evaluation
"The core value of this system is that it has been verified on actual ships, and the closed loop of radar detection and obstacle avoidance decision-making has been realized at sea. Now when we conduct autonomous navigation tests, we can finally focus on mission planning instead of staring at the screen all the time fearing collision." —— Engineer from the unmanned surface vessel project team of the institute