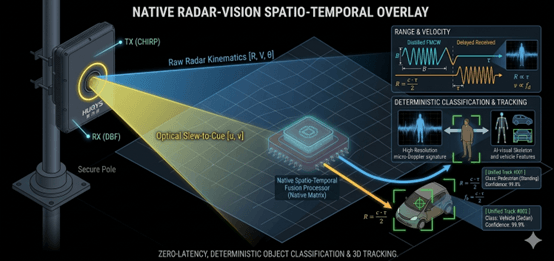
Ray-vision Fusion Target Recognition Technology
Based on the strong space-time synchronization mechanism at the underlying hardware of the integrated machine, a rigorous coordinate conversion matrix is used to perform real-time perspective projection of radar 3D motion vectors to the 2D pixel domain of the optical sensor. Under this unified benchmark, the fusion engine conducts in-depth cross-validation between radar Doppler motion features and visual AI semantic features, realizing deterministic classification of high-value targets such as people and vehicles under complex perimeters and a closed-loop with extremely low false alarms.